ADI Trinamic是嵌入式电机和运动控制领域的技术领导者,拥有二十多年经验,在半导体行业被称作是一个神话,主要致力于运动控制产品的设计与研发(包括步进和直流无刷和伺服系统)。其主要产品包括芯片、模块和系统。产品具有体积小、集成度高、性能强等主要特点,可谓电机领域的“卷”王。ADI Trinamic将传统软件算法通过硬件来实现,可极大减轻生产研发的工作量。例如,集成S曲线加减速算法,可以让运动性能得到极大地提升,集成FOC算法可以让无刷电机开发变得轻而易举等等。
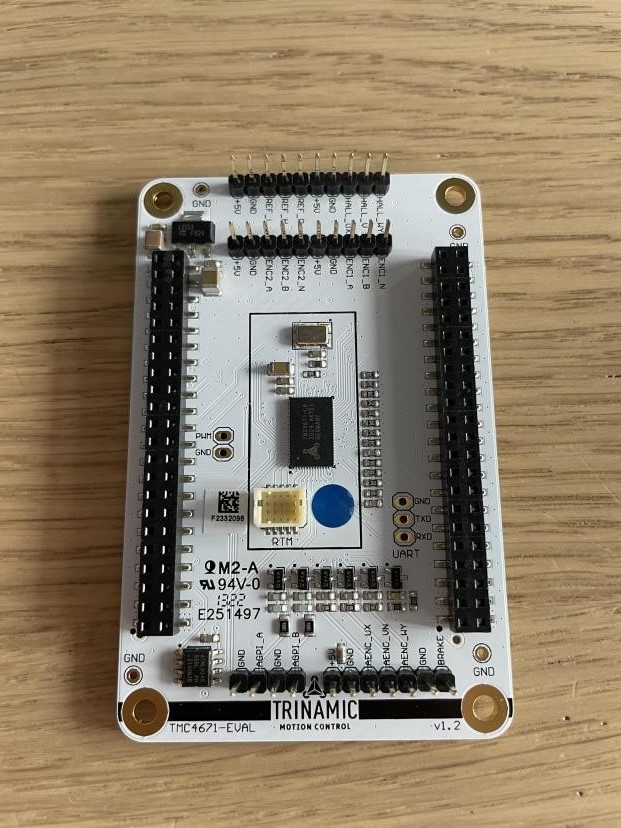
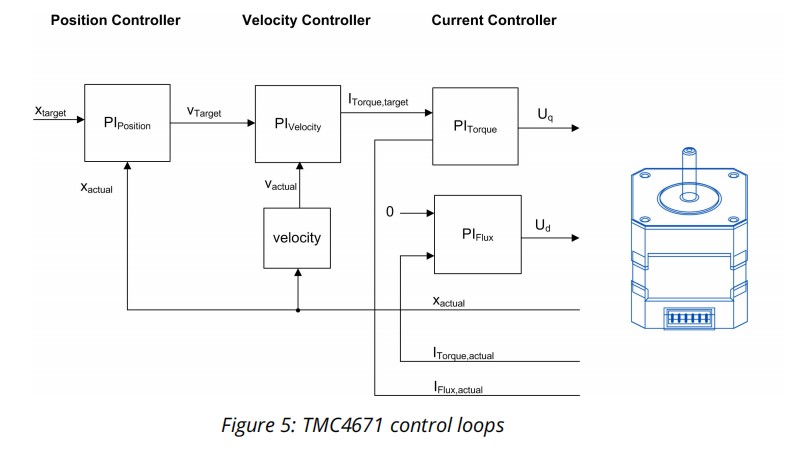
ADI Trinamic推出的TMC4671真是电机控制领域的福音,由于算法直接集成到了芯片内部,电机小白可以不用研究晦涩难懂的clarke、park、反clarke、反park等FOC控制理论知识,只需要配置简单的寄存器,即可对电机进行快速开发,极大地节省了开发成本,相信定是未来一大趋势,未来可期。