锂离子(Li-Ion)电池是电动汽车和混合动力汽车的常用储能方法。这些电池可提供的能量密度在所有现有电池技术中是非常高的,但是如果要最大限度地提升性能,必须使用电池监控系统(BMS)。先进的BMS不仅使您能够从电池组中提取大量的电荷,而且还可以以更安全的方式管理充电和放电循环,从而延长使用寿命。ADI公司提供种类齐全的BMS器件组合,专注于精度和稳健的运行。
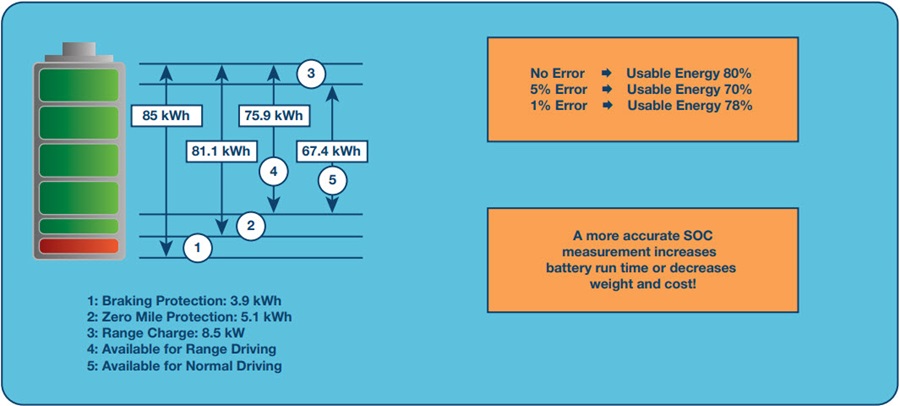
精确测量电池的充电状态(SOC)可以延长电池运行时间或减轻重量。精密稳定的器件在PCB装配后无需工厂校准。长期稳定性提高了安全性并可避免保修问题。自我诊断功能有助于达到合适的汽车安全完整性等级(ASIL)。电池组是充满电磁干扰(EMI)挑战的环境,因此在设计数据通信链路时要进行特别处理,以确 保测量芯片与系统控制器之间稳健可靠的通信。电缆和连接器是造成电池系统故障的主要原因,因此本文介绍了无线解决方案。无线通信设计提高了可靠性并减轻了系统总重量,进而增加了每次充电的行驶里程。
储能单元必须能够提供大容量,并且能以可控方式释放能量。如果不能进行适当的控制,能量的存储和释放会导致电池灾难性故障,并最终引起火灾。电池可能会由于多种原因而发生故障,其中大多数与不当使用有关。故障可能来自机械应力或损坏,以及以深度放电、过度充电、过电流和热过应力等形式表现出的电气过载。为了尽可能提高效率和安全性,电池监控系统必不可少。
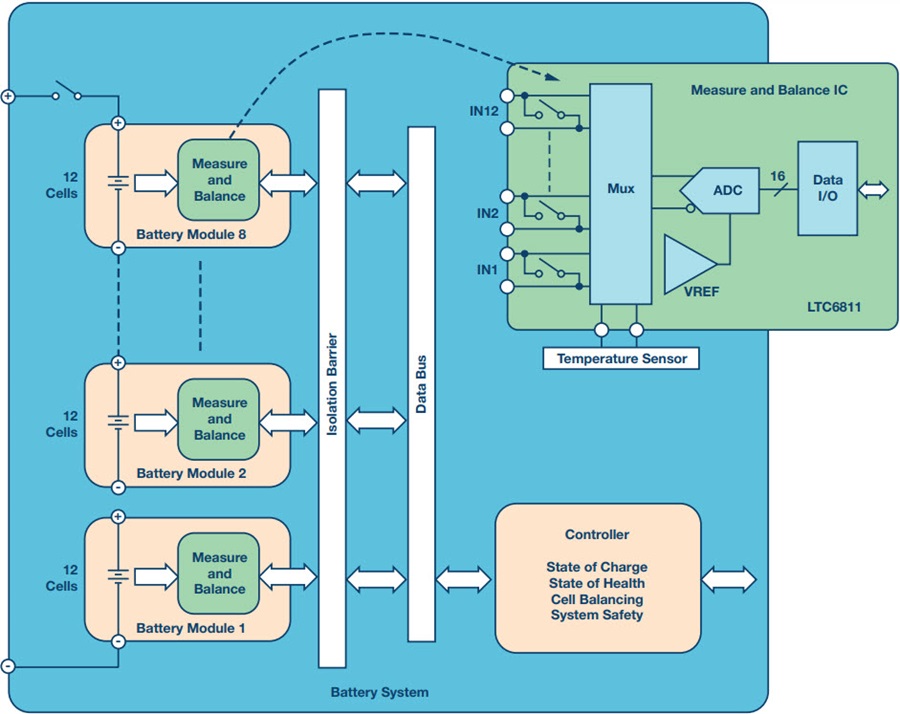
电动汽车电池由几节电池串联组成。一个典型的电池组(具有96节串联电池)以4.2 V充电时会产生超过400 V的总电压。电池组中的电池节数越多,所达到的电压就越高。所有电池的充电和放电电流都相同,但是必须对每节电池上的电压进行监控。为了容纳高功率汽车系统所需的大量电池,通常将多节电池分成几个模块,并分置于车辆的整个可用空间内。典型模块拥有10到24节电池,可以采用不同配置进行装配以适合多个车辆平台。模块化设计可作为大型电池组的基础。它允许将电池组分置于更大的区域,从而更有效地利用空间。
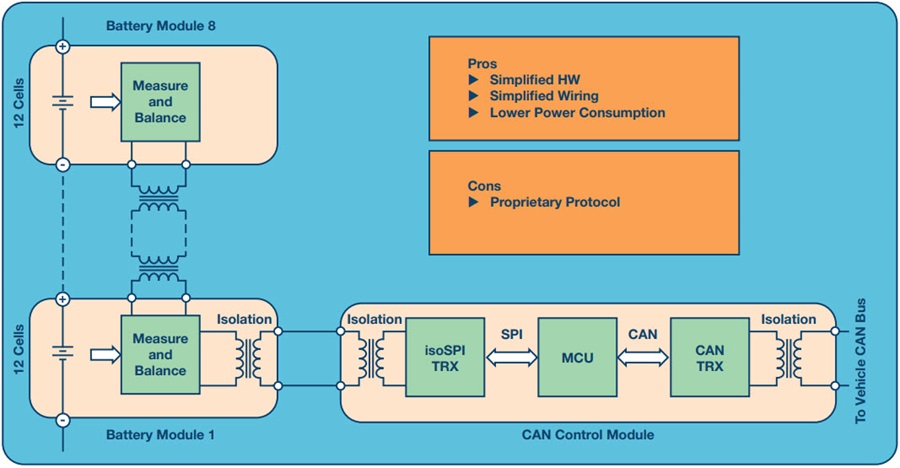
ADI创新的双线式isoSPI接口是CAN总线接口的替代方法。1 接口集成在每个LTC6811中,使用一个简单的变压器和一根简单的双绞线,而非CAN总线所需的四线。isoSPI接口提供了一个抗噪接口(用于高电平RF信号),利用该接口可以将模块通过长电缆以菊花链形式连接,并以高达1 Mbps的数据速率运行。图3显示了基于isoSPI并使用CAN模块作为网关的架构。
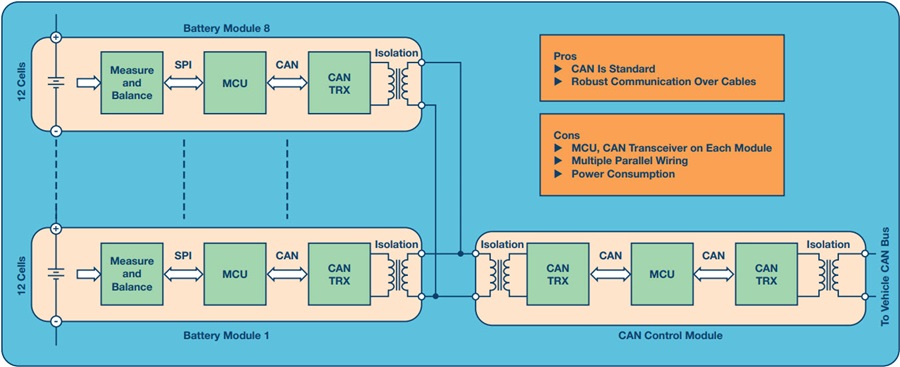
图2和图3所示的两种架构各有利弊。CAN模块是标准化模块,可以与其他CAN子系统共享同一总线运行;isoSPI接口是专有接口,只能与相同类型的器件进行通信。另一方面,isoSPI模块不需要额外的收发器和MCU来处理软件堆栈,从而使解决方案更紧凑、更易于使用。两种架构都需要有线连接,这在现代BMS 中具有明显的缺点,因为在布线中,导线走线至不同的模块会成为一个棘手的问题,同时又增加了重量和复杂性。导线也很容易吸收噪声,从而需要进行额外的滤波。
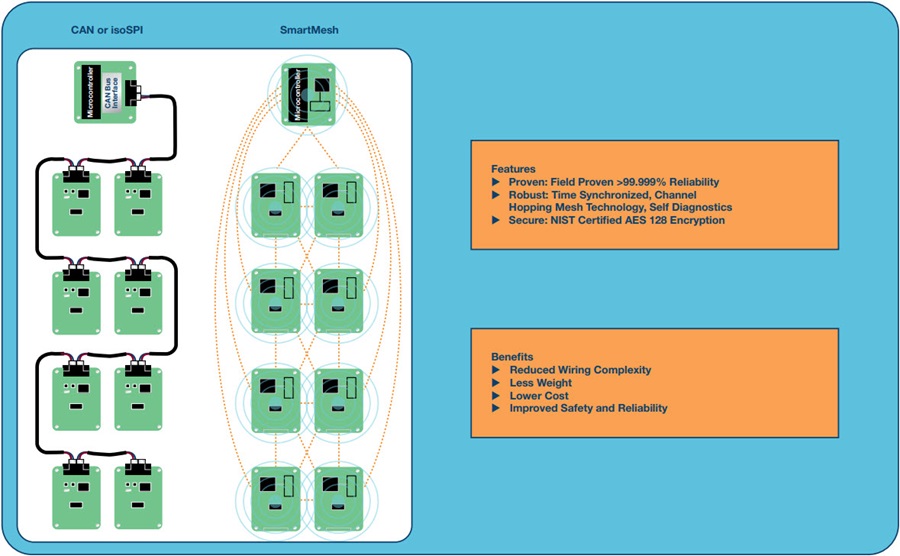
ADI演示了业界首款无线汽车BMS概念车,在 BMW i3.2这是一项重大突破,有望提高电动汽车/混合动力汽车大型多节电池组的 可靠性,并降低成本、重量和布线复杂性。
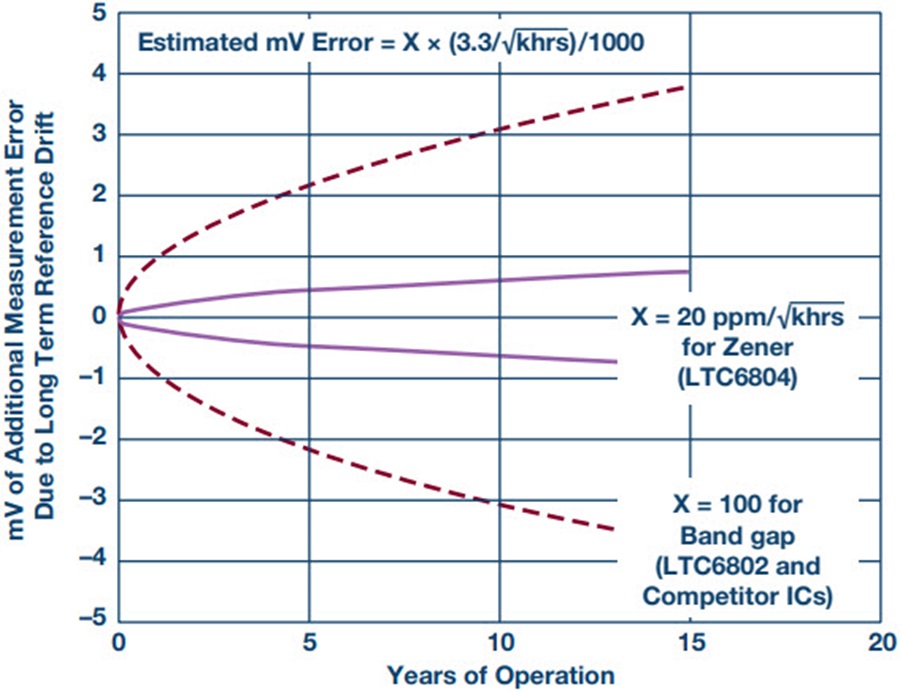
图7对比了带隙基准电压源IC和埋入式齐纳二极管基准电压源IC的长期漂移。初始测量值的误差校准为0 mV。通过在30°C下3000小时之后的漂移来预测十年的测量漂移。该图片清楚地显示了随着时间的推移,齐纳二极管基准电压源具有更出色的稳 定性,至少比带隙基准电压源提高5倍。类似的湿度和PCB装配应力测试表明,埋入式齐纳二极管的性能比带隙基准电压源更胜一筹。
低排放车辆的关键是电气化,但还需要对能源(锂离子电池)进行智能管理。如果管理不当,电池组可能会变得不可靠,从而大大降低汽车的安全性。高精度有助于提高电池的性能和使用寿命。主动和被动电池平衡可实现安全高效的电池管理。分布式电池模块易于支持,并且将数据稳定地传递到BMS控制器(无论是有线方式还是无线方式)能够实现可靠的SOC和SOH计算。
带*号的为必填项
集成菊花链接口的第4代12通道多单元电池监控器
多节电池的电池组监视器
8 通道锂离子电池监控系统
12通道多节电池电池监控器
微信客服